6軸ジャイロ・加速度センサー値をグラフにする
コロナ禍での自粛で外に出れないので、電子工作で時間を潰せないかと考えるこの頃です。
さて先日、6軸ジャイロ・加速度センサーのMPU-6050を購入しました。
ジャイロセンサーは角速度(回転運動をする点の速度を、中心に対して単位時間に回転する角度で表したもの)を測定します。
何か難しいですが、物体の1秒当たりの回転速度と理解しました。
そして、加速度センサーは、物体の1秒当たりの速度変化を測定します。
これをロール軸(x軸)、ピッチ軸(y軸)、ヨー軸(z軸)の3つの軸でそれぞれ計測できるので、3 × 2 = 6軸センサーということらしいです。
加速度センサーでデバイスにかかる重力、振動、衝撃を計測できるということらしいです。
地磁気(コンパス)センサーを加えた9軸のものもあるそうです。
曲がってる方にしました。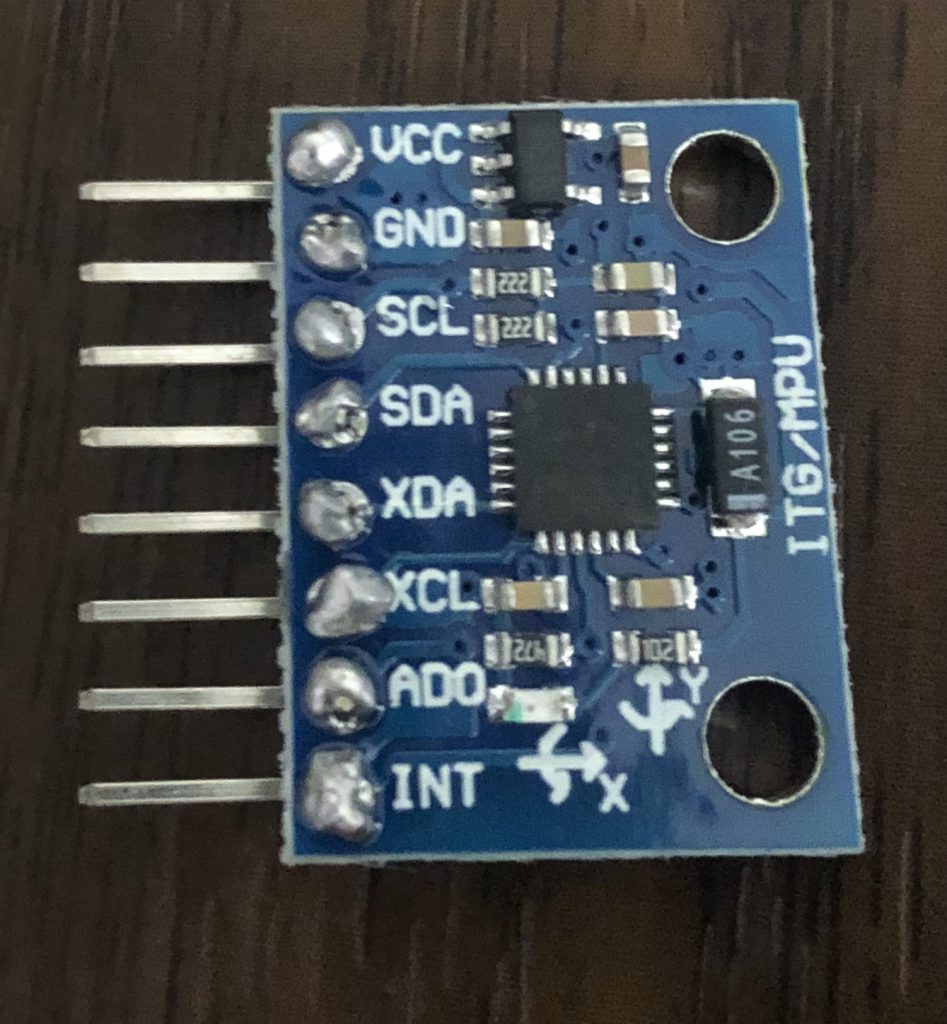
よく見るとロール軸(x軸)とピッチ軸(y軸)の向きが書いてありますね。
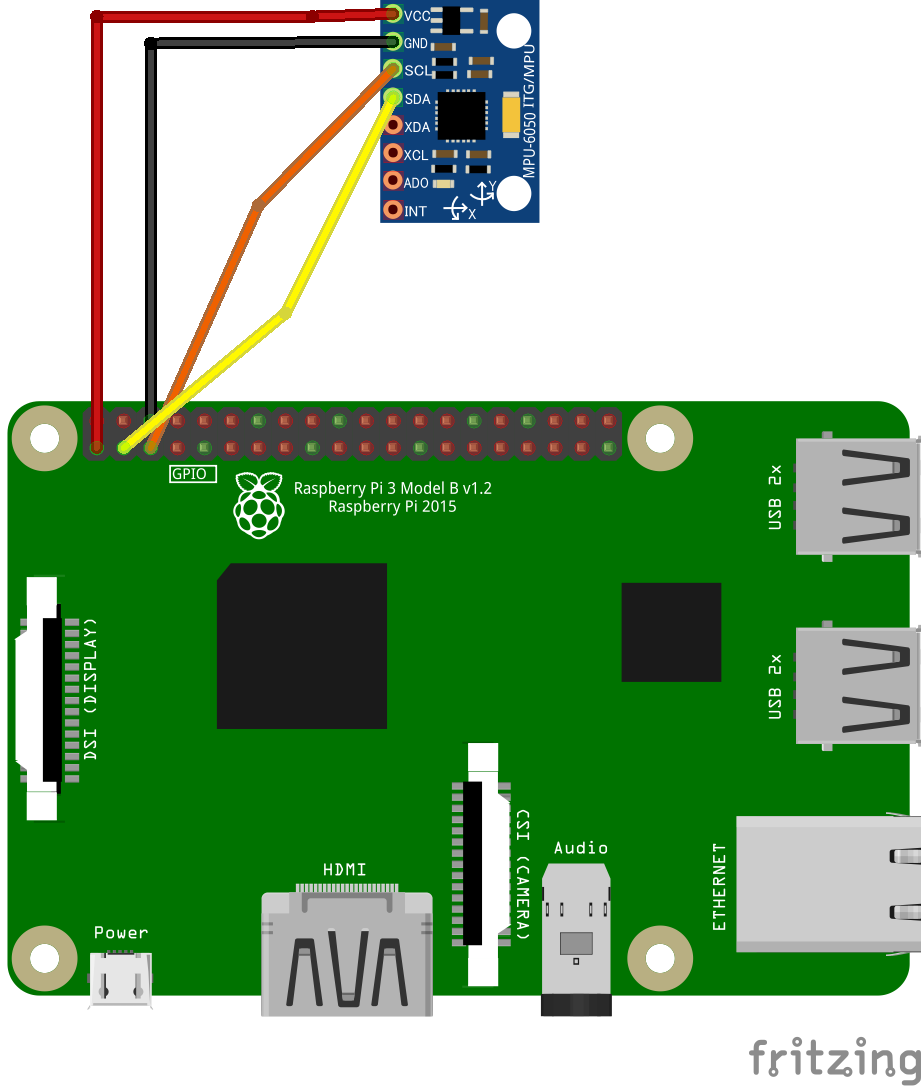
Raspberry Piに配線します。
1PIN(+3.3V)をVCC
6PIN(GND)をGND
5PIN(GPIO3)をSCL(I2C)
3PIN(GPIO2)をSDA(I2C)
にそれぞれ接続します。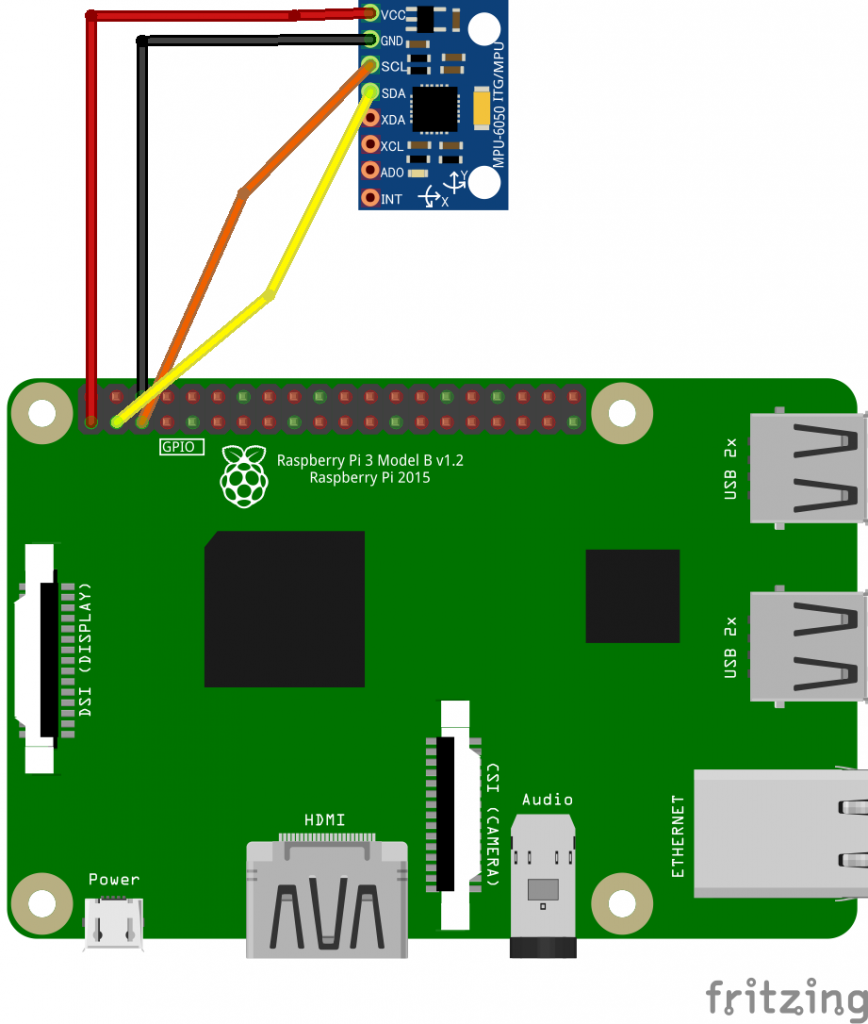
ターミナルから「sudo raspi-config」コマンドを実行するかモニターを繋いでいるなら「Raspberry Piの設定->インターフェイス」からI2Cを有効にします。
I2Cを有効にしたら、デバイスを認識しているか確認します。
コマンド実行結果が上記のようになっていれば認識されています。
これで準備完了です。
センサーデータをPythonで取得してみます。
こんな感じでデータが取れました。
温度も取れますが、実際の温度より5℃以上高いのであまり精度は高くなさそうです。
センサーの値が動的にグラフに反映されます。
ロール軸(x軸)をひねるとグラフのxの値が変化してることが見て取れて、センサーの向きとデータの変化の関連が分かりやすいですね。
さて先日、6軸ジャイロ・加速度センサーのMPU-6050を購入しました。
6軸センサーとは
早速ラズパイに取り付けて遊んでみますが、その前に物理のお勉強です。ジャイロセンサーは角速度(回転運動をする点の速度を、中心に対して単位時間に回転する角度で表したもの)を測定します。
何か難しいですが、物体の1秒当たりの回転速度と理解しました。
そして、加速度センサーは、物体の1秒当たりの速度変化を測定します。
これをロール軸(x軸)、ピッチ軸(y軸)、ヨー軸(z軸)の3つの軸でそれぞれ計測できるので、3 × 2 = 6軸センサーということらしいです。
加速度センサーでデバイスにかかる重力、振動、衝撃を計測できるということらしいです。
地磁気(コンパス)センサーを加えた9軸のものもあるそうです。
Raspberry Piに接続してセンサーデータを取得する
配線する
曲がってる方にしました。
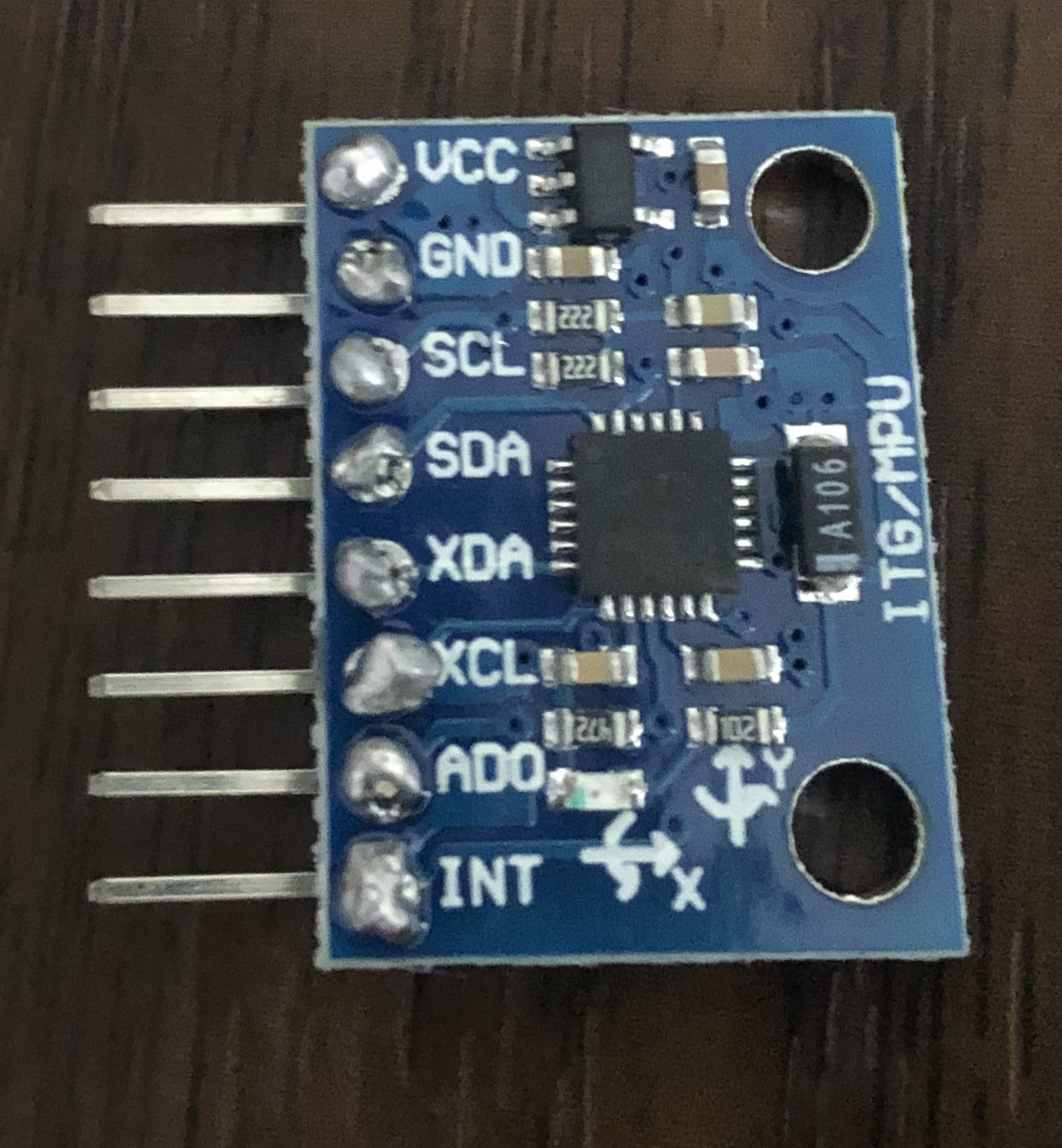
よく見るとロール軸(x軸)とピッチ軸(y軸)の向きが書いてありますね。
Raspberry Piに配線します。
1PIN(+3.3V)をVCC
6PIN(GND)をGND
5PIN(GPIO3)をSCL(I2C)
3PIN(GPIO2)をSDA(I2C)
にそれぞれ接続します。
センサーデータを取得する
MPU-6050とのデータ通信にはI2C(Inter-Integrated Circuit)を使います。ターミナルから「sudo raspi-config」コマンドを実行するかモニターを繋いでいるなら「Raspberry Piの設定->インターフェイス」からI2Cを有効にします。
I2Cを有効にしたら、デバイスを認識しているか確認します。
$ sudo i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- 68 -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --これで準備完了です。
センサーデータをPythonで取得してみます。
$ git clone https://github.com/Tijndagamer/mpu6050.git
$ cd mpu6050/
$ sudo python3 setup.py install
$ vi mpu6050.pyfrom mpu6050 import mpu6050
from time import sleep
sensor = mpu6050(0x68)
while True:
gyro_data = sensor.get_gyro_data()
accel_data = sensor.get_accel_data()
temp = sensor.get_temp()
# 小数点以下第3位まで表示
print("【角速度】 x:" + "%6.3f" % gyro_data['x'] + " y:" + "%6.3f" % gyro_data['y'] + " z:" + "%6.3f" % gyro_data['z'])
# 小数点以下第3位まで表示
print("【加速度】 x:" + "%6.3f" % accel_data['x'] + " y:" + "%6.3f" % accel_data['y'] + " z:" + "%6.3f" % accel_data['z'])
# 小数点以下第1位まで表示
print("【温度】" + "%4.1f" % temp + "℃")
sleep(0.5)$ python3 mpu6050.py
【角速度】 x:-250.137 y:-223.679 z:-98.435
【加速度】 x:-3.893 y:-0.881 z: 9.483
【温度】25.7℃
【角速度】 x:82.191 y:-9.412 z:-111.466
【加速度】 x: 0.807 y:-4.324 z: 5.073
【温度】25.8℃
【角速度】 x:250.130 y:73.191 z:91.771
【加速度】 x:-2.172 y:-1.434 z: 9.629
【温度】25.8℃
【角速度】 x:-141.870 y:-122.191 z:42.802
【加速度】 x: 1.027 y: 8.384 z: 4.077
【温度】25.8℃
【角速度】 x:79.740 y:49.321 z:-250.137
【加速度】 x: 3.455 y: 1.063 z: 5.389
【温度】25.8℃
【角速度】 x:-91.595 y:17.397 z:-28.229
【加速度】 x:-4.271 y: 6.819 z: 8.191
【温度】25.8℃
【角速度】 x:-21.573 y: 4.458 z:-3.000
【加速度】 x:-4.621 y: 6.136 z: 7.187
【温度】25.8℃
【角速度】 x:-8.542 y:-0.863 z:-0.458
【加速度】 x:-4.836 y: 6.105 z: 6.869
【温度】25.8℃温度も取れますが、実際の温度より5℃以上高いのであまり精度は高くなさそうです。
取得したデータをグラフにする
データは取れましたが、これではセンサーの状態とデータの関連が分かりにくいので、Matplotlibでグラフにして可視化します。from mpu6050 import mpu6050
from time import sleep
sensor = mpu6050(0x68)
import numpy as np
import matplotlib.pyplot as plt
def plot_loop():
# センサーデータ取得
temp = "%4.1f" % sensor.get_temp()
gyro_data = sensor.get_gyro_data()
accel_data = sensor.get_accel_data()
fig, (ax_temp, ax_gyro, ax_accel) = plt.subplots(ncols=3, figsize=(10,7))
# X座標
sec = np.arange(-np.pi, np.pi, 0.1)
# 温度のY座標
temp_list = np.zeros(63)
temp_list[0] = temp
line_temp, = ax_temp.plot(sec, temp_list, color="red")
ax_temp.set_title("temperature")
ax_temp.set_ylim(-10, 40)
ax_temp.set_xticks([]) # X軸のメモリ非表示
# 角速度のY座標
# ロール軸(x)
gyro_list_x = np.zeros(63)
gyro_list_x[0] = "%6.3f" % gyro_data['x']
gyro_x_lines, = ax_gyro.plot(sec, gyro_list_x, color="red", label="x")
# ピッチ軸(y)
gyro_list_y = np.zeros(63)
gyro_list_y[0] = "%6.3f" % gyro_data['y']
gyro_y_lines, = ax_gyro.plot(sec, gyro_list_y, color="blue", label="y")
# ヨー軸(z)
gyro_list_z = np.zeros(63)
gyro_list_z[0] = "%6.3f" % gyro_data['z']
gyro_z_lines, = ax_gyro.plot(sec, gyro_list_z, color="green", label="z")
ax_gyro.legend() # ラベル描画
ax_gyro.set_title("gyro")
ax_gyro.set_ylim(-300, 300)
ax_gyro.set_xticks([]) # X軸のメモリ非表示
# 加速度のY座標
# ロール軸(x)
accel_list_x = np.zeros(63)
accel_list_x[0] = "%6.3f" % accel_data['x']
accel_x_lines, = ax_accel.plot(sec, accel_list_x, color="red", label="x")
# ピッチ軸(y)
accel_list_y = np.zeros(63)
accel_list_y[0] = "%6.3f" % accel_data['y']
accel_y_lines, = ax_accel.plot(sec, accel_list_y, color="blue", label="y")
# ヨー軸(z)
accel_list_z = np.zeros(63)
accel_list_z[0] = "%6.3f" % accel_data['z']
accel_z_lines, = ax_accel.plot(sec, accel_list_z, color="green", label="z")
ax_accel.legend() # ラベル描画
ax_accel.set_title("accel")
ax_accel.set_ylim(-30, 30)
ax_accel.set_xticks([]) # X軸のメモリ非表示
# plotし続ける
while True:
# センサーデータ取得
temp = "%4.1f" % sensor.get_temp()
gyro_data = sensor.get_gyro_data()
accel_data = sensor.get_accel_data()
# データの更新
sec += 0.1
temp_list = np.roll(temp_list, 1)
temp_list[0] = temp
gyro_list_x = np.roll(gyro_list_x, 1)
gyro_list_x[0] = "%6.3f" % gyro_data['x']
gyro_list_y = np.roll(gyro_list_y, 1)
gyro_list_y[0] = "%6.3f" % gyro_data['y']
gyro_list_z = np.roll(gyro_list_z, 1)
gyro_list_z[0] = "%6.3f" % gyro_data['z']
accel_list_x = np.roll(accel_list_x, 1)
accel_list_x[0] = "%6.3f" % accel_data['x']
accel_list_y = np.roll(accel_list_y, 1)
accel_list_y[0] = "%6.3f" % accel_data['y']
accel_list_z = np.roll(accel_list_z, 1)
accel_list_z[0] = "%6.3f" % accel_data['z']
# グラフへデータの再セット
line_temp.set_data(sec, temp_list)
line_temp.set_data(sec, temp_list)
gyro_x_lines.set_data(sec, gyro_list_x)
gyro_y_lines.set_data(sec, gyro_list_y)
gyro_z_lines.set_data(sec, gyro_list_z)
accel_x_lines.set_data(sec, accel_list_x)
accel_y_lines.set_data(sec, accel_list_y)
accel_z_lines.set_data(sec, accel_list_z)
# X軸の更新
ax_temp.set_xlim((sec.min(), sec.max()))
ax_gyro.set_xlim((sec.min(), sec.max()))
ax_accel.set_xlim((sec.min(), sec.max()))
print("【温度】" + temp + "℃")
print("【角速度】 x:" + "%6.3f" % gyro_data['x'] + " y:" + "%6.3f" % gyro_data['y'] + " z:" + "%6.3f" % gyro_data['z'])
print("【加速度】 x:" + "%6.3f" % accel_data['x'] + " y:" + "%6.3f" % accel_data['y'] + " z:" + "%6.3f" % accel_data['z'])
plt.pause(0.1) # sleep時間(秒)
if __name__ == "__main__":
plot_loop()
センサーの値が動的にグラフに反映されます。
ロール軸(x軸)をひねるとグラフのxの値が変化してることが見て取れて、センサーの向きとデータの変化の関連が分かりやすいですね。